
Do your pets trap themselves in rooms? Do you wish you could make your home more accessible for your furry* friends?? Now you can, hooray!! This project uses a micro:bit microcontroller to pull open a door when a (pet-friendly) switch… Read more
Do your pets trap themselves in rooms? Do you wish you could make your home more accessible for your furry* friends?? Now you can, hooray!! This project uses a micro:bit microcontroller to pull open a door when a (pet-friendly) switch… Read more

“Any sufficiently advanced technology is indistinguishable from magic.” (Arthur C. Clarke). Heck yes it is! What are we waiting for, let’s use technology to create our own kind of magic!! This project uses two micro:bit microcontrollers, a household cooling… Read more

While it is a bit tricky for us non-magical humans to levitate objects with our minds, words, or wands, we can use technology to do (basically) the same things! This project uses two micro:bits, a few small electronic parts,… Read more
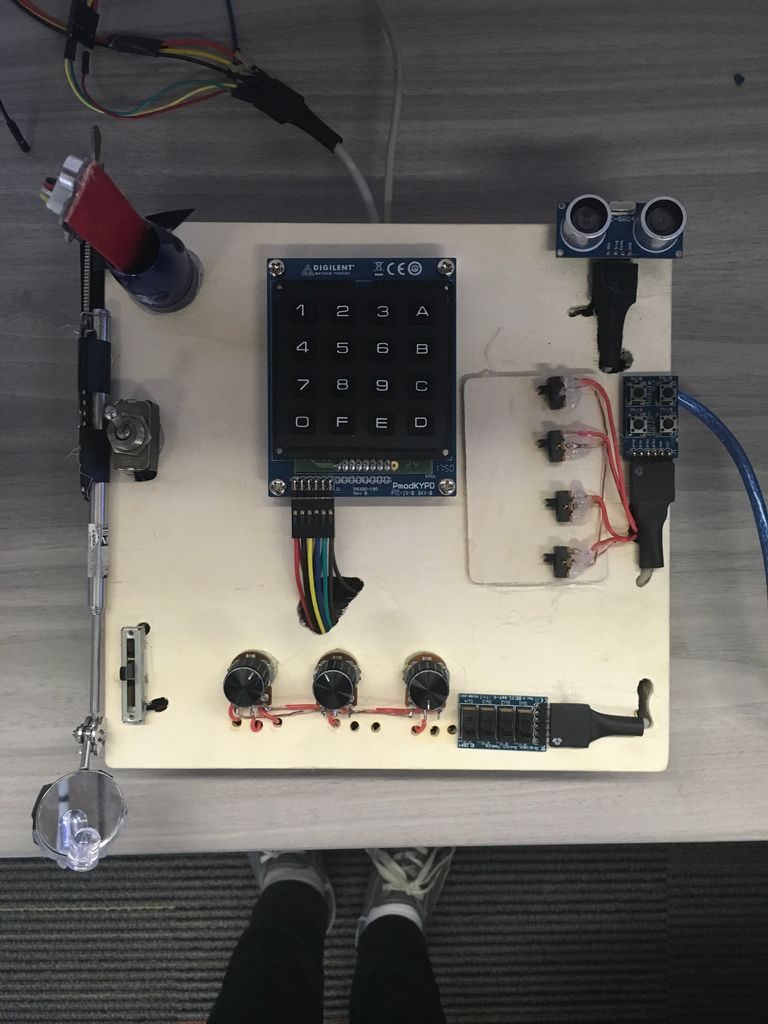
The motivation for this project was to create a controller that allows users to “play” light like it is an instrument with gesture control, custom visuals, and brightness/speed dials. Considering how pricey consumer light controllers can be (often $100 bucks… Read more
Science allows us to ask our most pressing questions and explore all sorts of curiosities. With some thought, hard work, and patience, we can use our explorations to build a better understanding and appreciation of the complex and beautiful world… Read more

What do remote controllers, routers, and robots all have in common? Microcontrollers! These days, beginner-friendly microcontrollers are easy to build with and program using just a laptop, a USB cable, and some (free) open-source software. The catch? There are like,… Read more
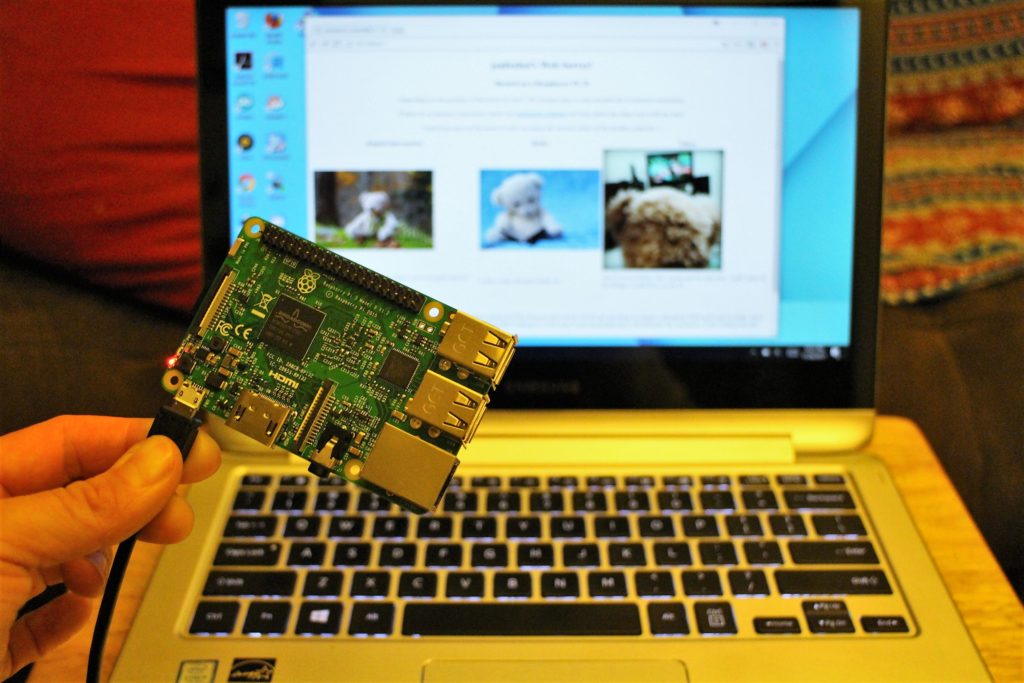
Save and access docs and photos and music on your own local Pi Cloud* server! The best part: you can use it if, or when, the Internet goes down (or if you’re in a remote spot & want access to Wikipedia)…. Read more
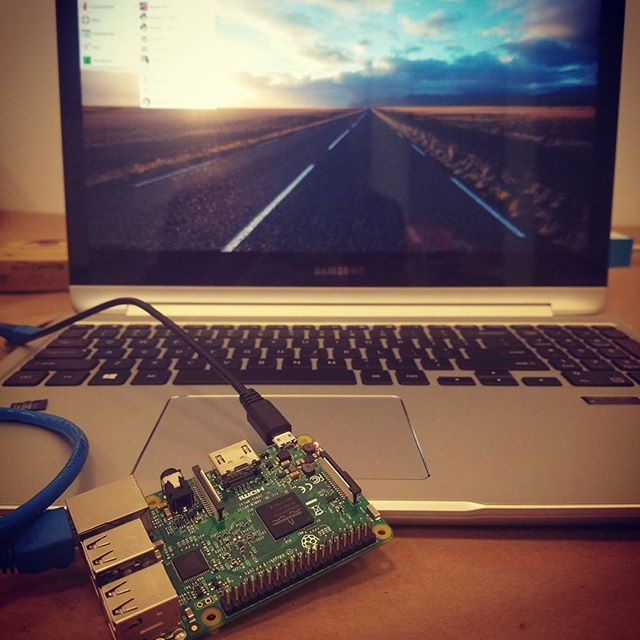
Finally! Use your Raspberry Pi without spending what feels like forever connecting external peripherals and dealing w/ a cable monstrosity: Configure your Pi to be headless! (not the scary kind tho) This is particularly helpful for folks teaching workshops with… Read more
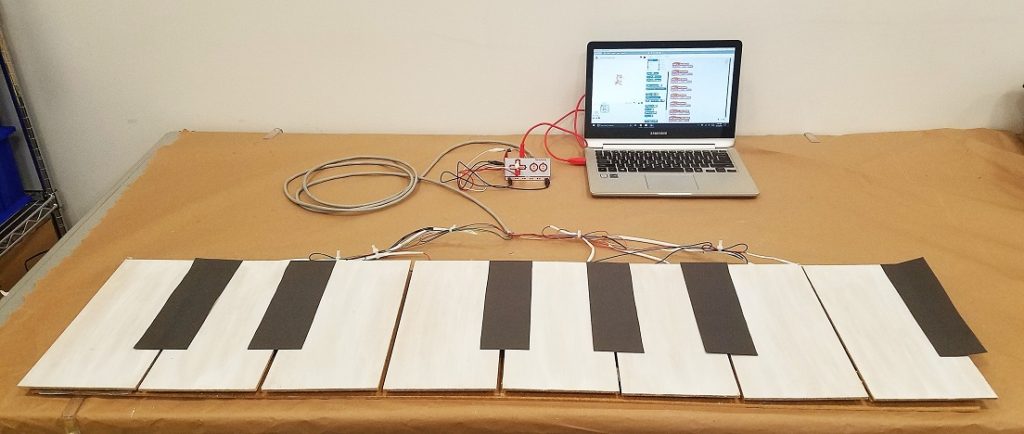
The household floor piano is a dream no more! The Makey Makey microcontroller makes it super easy (and affordable) to build your very own “foot-strument” out of common household materials. Grab a Makey Makey kit, some cardboard, and your musician shoes… Read more

Intro Nearly all of our wireless communication is done using radio waves*, including phone calls, text messages, and WiFi. With its built-in radio transmitters and receivers, the Micro:Bit microcontroller makes it super easy to build all sorts of projects with… Read more